
Graduate Intern
Feb 2026 - PresentJet Propulsion Laboratory
Developing reinforcement learning algorithms for dual-manipulator mobile manipulation on rover platforms.

I'm a PhD student at the Georgia Institute of Technology, where I work with Prof. Animesh Garg at the People, AI & Robots Lab on robot learning. My research focuses on imbuing robots with physical intelligence, driven by a broader curiosity to understand the inner workings of the human brain.
Previously, I completed my undergraduate and master's degrees at UC Berkeley, where I worked with Prof. Sergey Levine in the Robotic AI and Learning Lab.
I'm interested in
The background is an ambient worker-boid power grid. The swarm keeps power, cells, workers, and factory output in balance while the dashboard tracks the cycles.
Featured Research
, Jeremy A. Collins, Kunal Aneja, Nhi Nguyen, Priyadarshini Tamilselvan, Sri Siddarth Chakaravarthy P, Animesh Garg
CoRL 2025 Workshop Dexterous Manipulation Spotlight
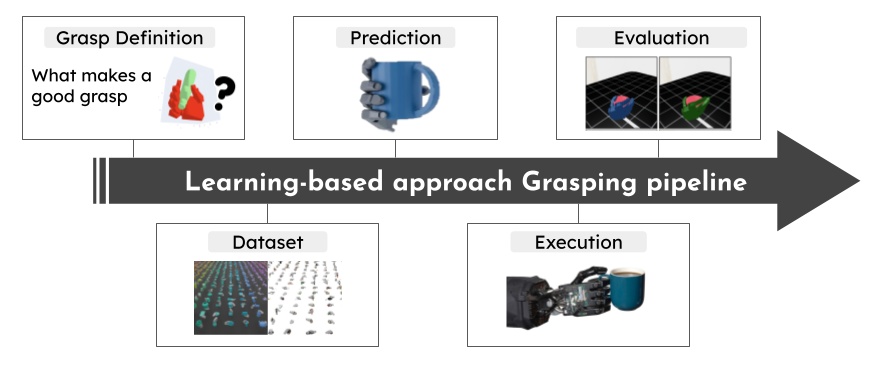
FLASH, a method for language-conditioned dexterous grasping that jointly models task intent and physical contact quality for robot hands.
Varun Giridhar, Ignat Georgiev, , Nicklas Hansen, Animesh Garg
Preprint
Policy-gradient ESNR predicts downstream policy performance, giving a practical diagnostic for "policy-aware" world models and guiding pretraining, architecture tweaks, and policy choice.
, Kunal Aneja, Chetan Reddy, Priyadarshini Tamilselvan, Nhi Nguyen, Sri Siddarth Chakaravarthy, Jeremy Collins, Miroslav Bogdanovic, Animesh Garg
Journal Preprint
A comprehensive survey of deep learning approaches for dexterous robotic grasping, emphasizing recent progress enabled by multi-modal models and data-driven techniques.
Dhruv Shah, Arjun Bhorkar, , Ilya Kostrikov, Nicholas Rhinehart, Sergey Levine
Oral at Conference on Robot Learning (CoRL) 2022
NeurIPS 2022 Workshop Offline RL
NeurIPS 2022 Workshop DeepRL
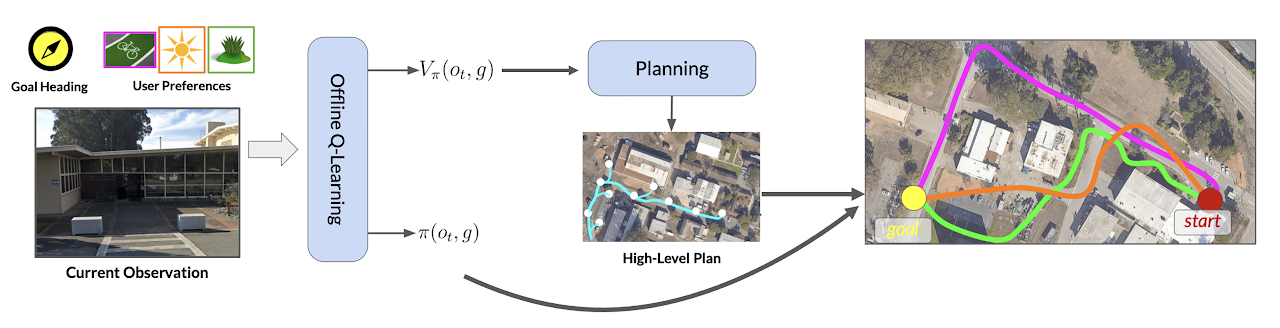
Offline RL doesn't scale well for long-horizon navigation but using values predicted with ORL within a topological graph framework can enable cool behavior on real robots!
Resume
Jet Propulsion Laboratory
Developing reinforcement learning algorithms for dual-manipulator mobile manipulation on rover platforms.

People, AI & Robots @ Georgia Tech
PhD student under Prof. Animesh Garg studying Robot Learning

Berkeley Artificial Intelligence Research
Under the advisement of PhD students Dhruv Shah and Laura Smith and Prof. Sergey Levine, completed my masters thesis in robot learning for mobile manipulation
Berkeley Artificial Intelligence Research
Advised by PhD student Dhruv Shah and Prof. Sergey Levine, investigating offline reinforcement learning for navigational robots.

Apple
Built/Deployed AI models in IP software assistance

Georgia Insititute of Technology

University of California Berkeley
Honor's Degree in Mathematics, in the Dean's List for College Of Letters & Science for Fall 2020, Fall 2021, Spring 2022, GPA: 3.965

Organization Name
TA for CS188 (Artificial Intelligence)

UC Berkeley Electrical Engineering & Computer Sciences (EECS)
Academic Intern for CS61A and CS61C. Lab tutor for EECS16B
Get In Touch
I'd love to hear from you. Send me a message!
I'm always interested in new opportunities, collaborations, and interesting projects. Whether you have a question, want to work together, or just want to say hello, I'd love to hear from you!
hrishi.leen@gmail.com
Send EmailConnect with me professionally
View ProfileCheck out my code and projects
View Profile